Pixels in. World state out.
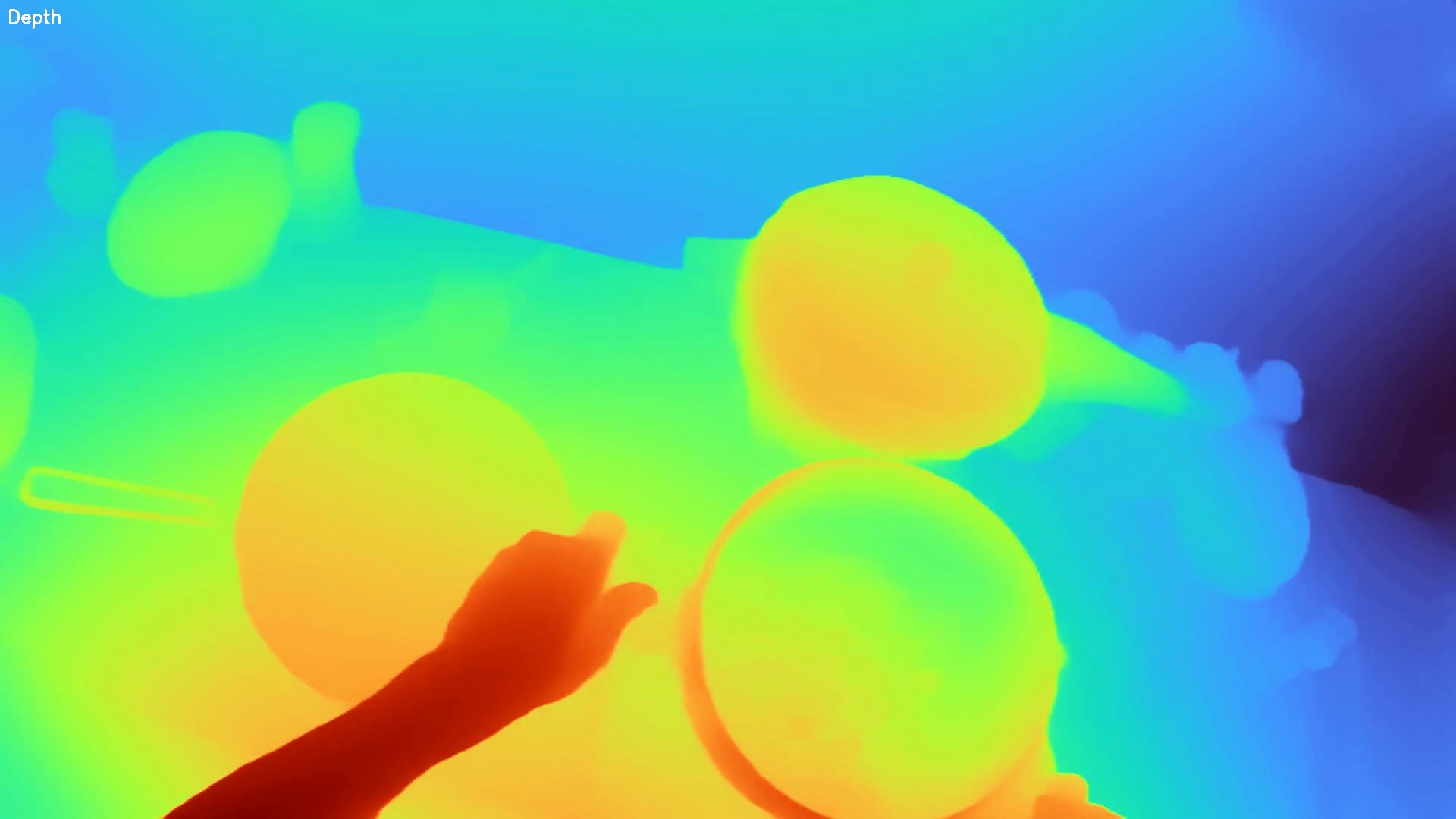
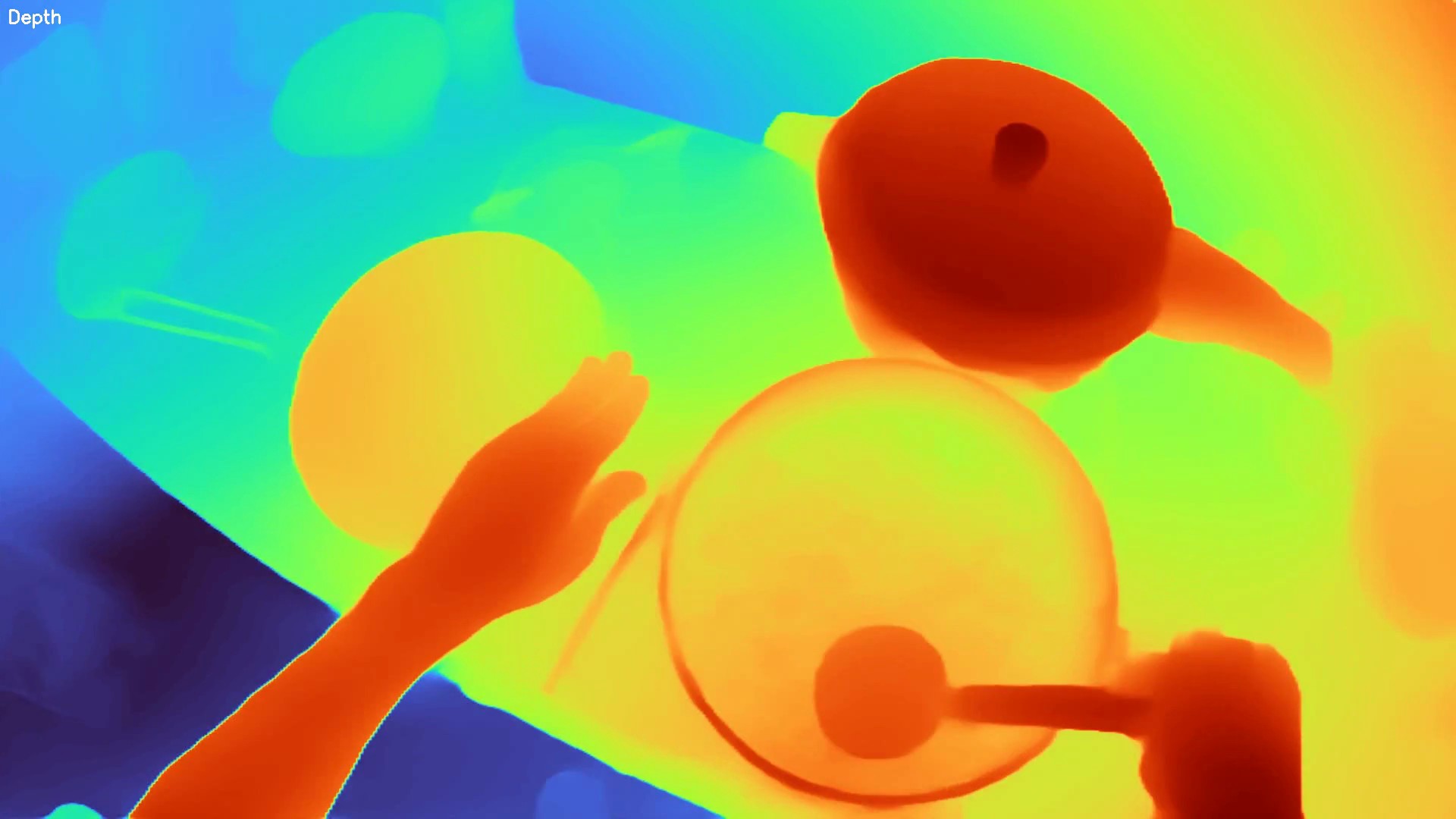
We capture egocentric and overhead video in real environments and lift every frame into structured world state — dense depth, panoptic segmentation, hand pose — in real time, on commodity hardware.
Focus Areas
Spatial Intelligence
Real-time 3D scene understanding, spatial reasoning, and world modeling for embodied agents.
Vision-Language Models
Multimodal architectures connecting visual perception with language understanding and generation.
Embodied AI
Training agents that perceive and act in the physical world — from robotics to AR/VR systems.
World Index — Live Samples
Our stack lifts ordinary RGB video into structured world state — dense depth, panoptic segmentation, and hand pose — running in real time on commodity hardware. Below: raw outputs captured from egocentric and overhead viewpoints in unstructured everyday environments.


Latest Research
View all →Spatial Reasoning in Vision Transformers: A Survey and New Directions
We survey recent advances in spatial reasoning capabilities of vision transformers and propose a new benchmark for evaluating 3D scene understanding from 2D inputs.
Building a Real-Time World Index: From Pixels to Semantic Maps
How we approach the problem of building structured, queryable representations of physical environments from streaming video — our architecture and lessons learned.
Open-Vocabulary Object Detection on the Edge: Practical Tricks That Work
Notes from our experience deploying open-vocabulary detection models on edge devices — what works, what doesn't, and the trade-offs we've made.